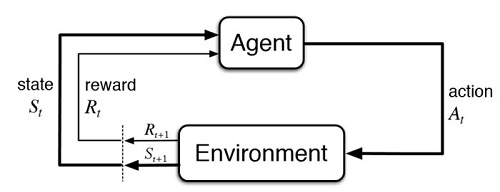
強化式學習之4~Q-learning Leave a Comment / Blog7 / By 楊慶忠 3-4:Q-learning增強式學習裡面,有一個很基本的技巧,叫做Q-learning。Q是Quality的意思,指在某種狀態下,採取某個行動的價值,或者說在幾個可供選擇的行動中,各個行動品質的量化評估。Q-learning的演練例子當中,除了先前提過的迷宮遊戲之外,Open AI公司所提供的Gym Cart-Pole,「木棒平衡滑車」遊戲 ,是被引用次數相當多典型範例,它訓練滑車左右快速移動,來讓繞軸轉動的木棒可以維持平衡。 上圖的實驗是不容易複製的,除了程式設計之外,還要有精準的機械控制模組來協作,一般人是沒辦法模仿的。所以變通的方式,就是純粹用電腦動畫遊戲來模擬看看。但模擬過程的計算還真不好處理,因為木棒的軌跡,除了移動還有轉動,要做得維妙維肖,除了程式語言,還要有力學的演算技巧。只是一般設計程式的人,往往連「角速度乘以曲率半徑等於線性速度」,這樣的物理基礎都沒有,所以設計出來的動畫遊戲,就如下圖這般形似而神異了。 Cart-Pole這個訓練遊戲的重點,是在決定整個環境(environment)有哪些狀態(state),代理人(agent)有哪些動作(action)。只不過它的四個狀態中,木棒角度和角速度就會難倒很多人,嚴格來講,這個練習並不適合讓初學者來嘗試。 值得慶幸的是它的代理人動作倒還很簡單,就是滑車在某個位置時,要決定下一步是朝左移一格、朝右移一格或靜止不動這三種。我們把這三種動作維持不變,場景改成類似個人版的乒乓球遊戲,狀態就可大幅簡化成三個物體的位置,如此,初學者就可以很清楚,在套用Q-learning的時候,Q-table的四軸陣列,應該要如何建立起來了。 上圖的訓練遊戲,它的reward值,在球接觸到拍子的狀態,應該是一個大的正數,在球接觸到地板的狀態,應該是一個大的負數,其他的狀態,給予 -1的reward即可。它可據此算出各個狀態的最適行動Q值,來決定下一步應該採取的行動。這整個場景像是一維半(1.5D)的乒乓球遊戲,因為兩個球都只能在垂直方向移動,如果可以讓一個球在二維平面(2D)上持續移動,那就是個人乒乓遊戲的AI版本了。